Projekt 1.1 - Plnou parou vpřed !
6. Detekce překážky dotykem
- S předchozím programem robot objel překážku, o které předem věděl.
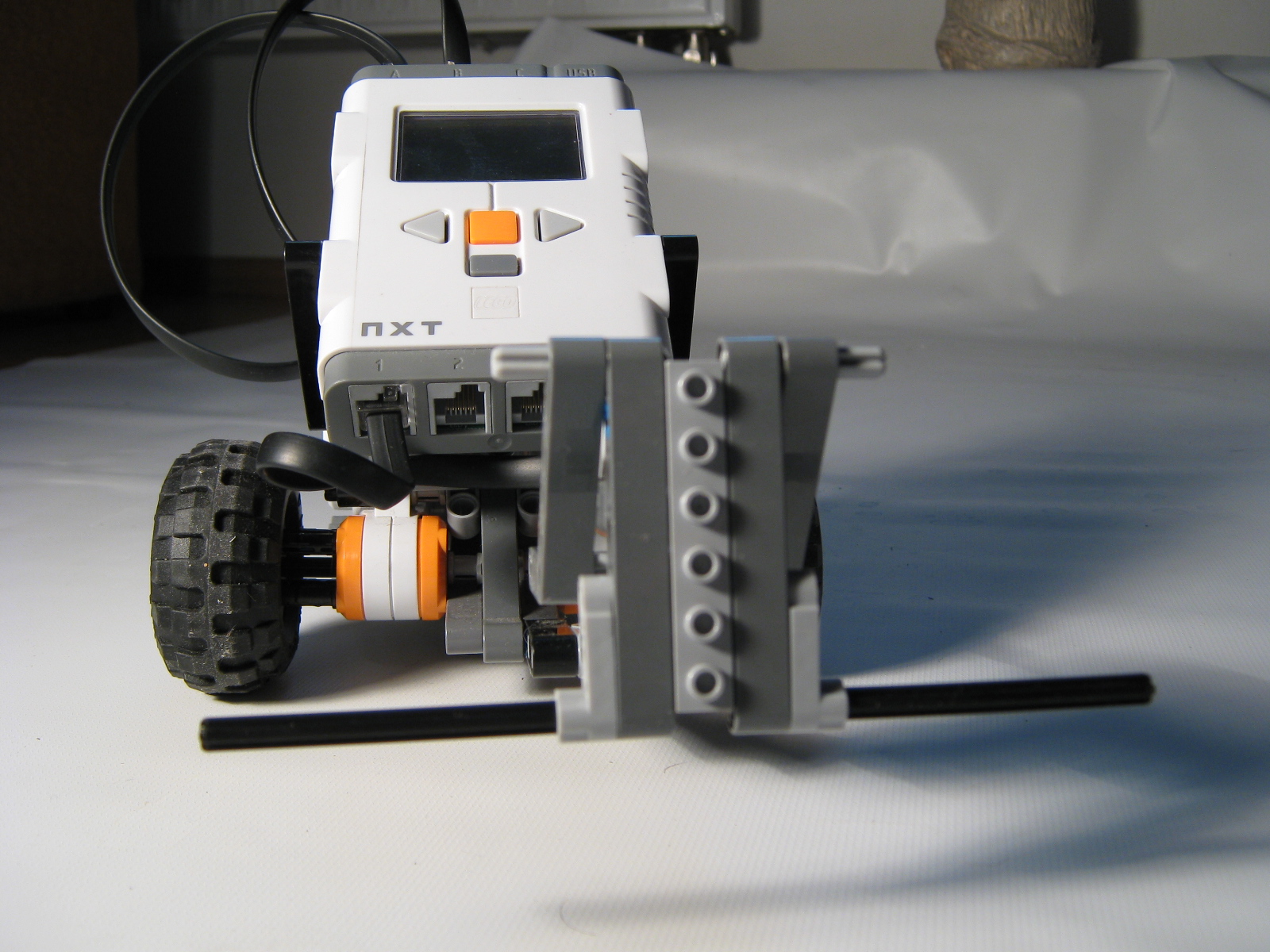
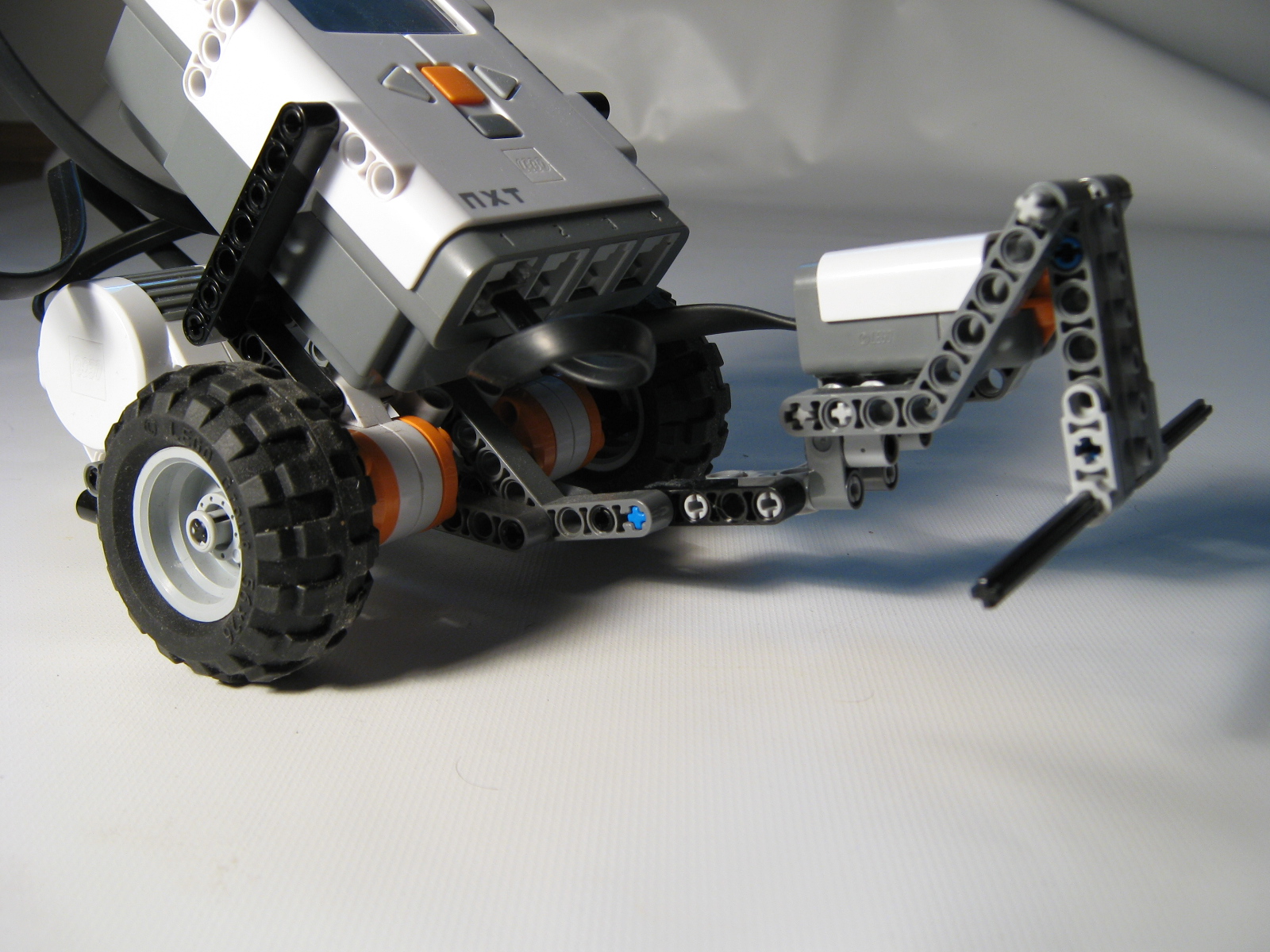
- Nyní zkusíme robota vybavit čidlem dotyku (touch sensor), aby překážku sám detekoval.
- Tento senzor je velmi jednoduchý, je to jen tlačítko, které při stisknutí spojí vodiče vedoucí do robota.
- V praxi se používá velmi často např. jako koncový spínač u výtahu, aby nepřejel za konec dráhy.
- Senzor dotyku připojíme na vstupní port 1.
- Nyní už robot bude vědět, že do překážky narazil a bude moci na tuto situaci reagovat.