Projekt 1.1 - Plnou parou v před
1. Sestavení jezdícího robota
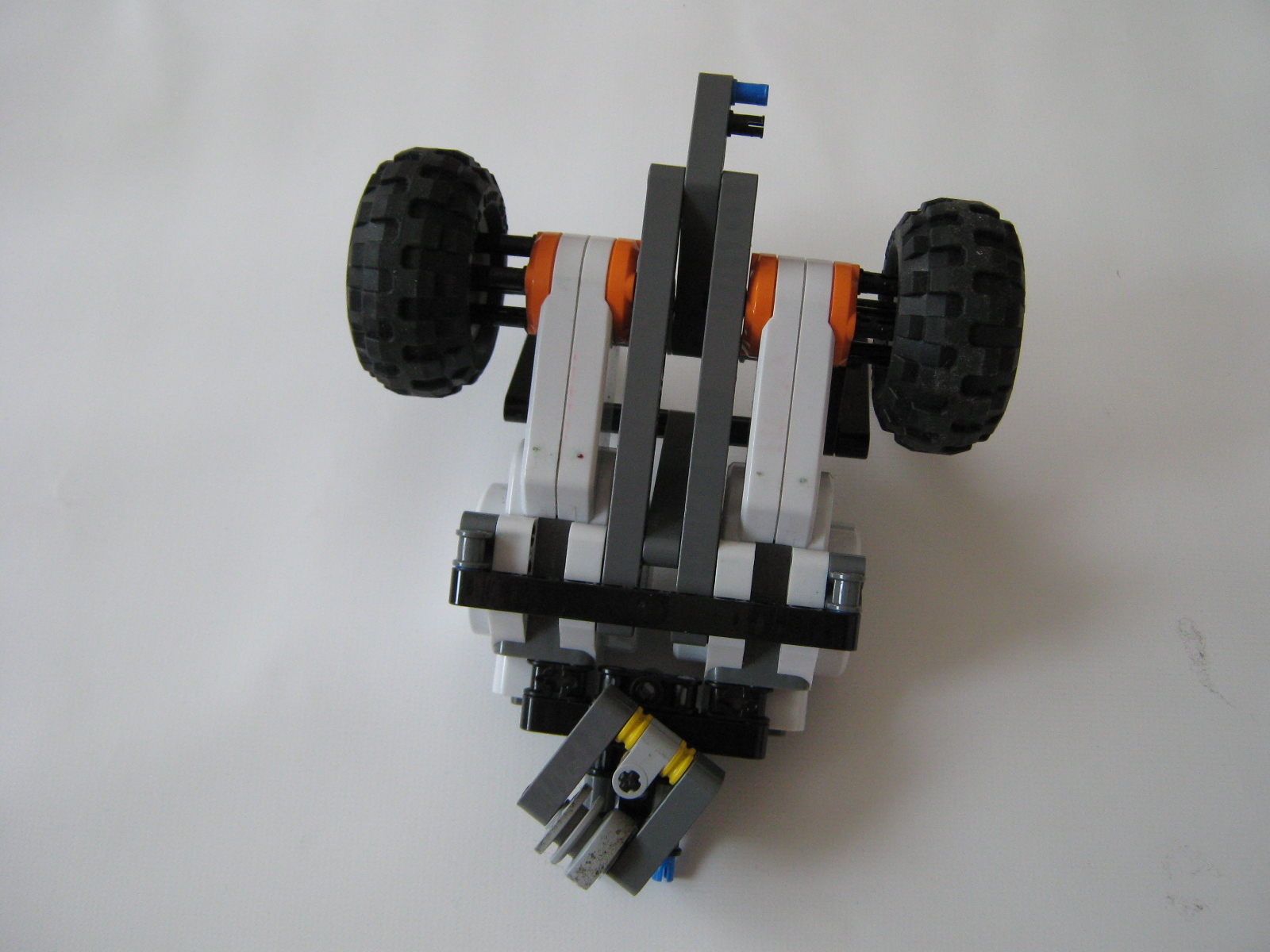

Nejprve sestavíme robota
- Můžeme vymyslet vlastní konstrukci, nebo využít manuálu k sestavení modelu Taskbot.
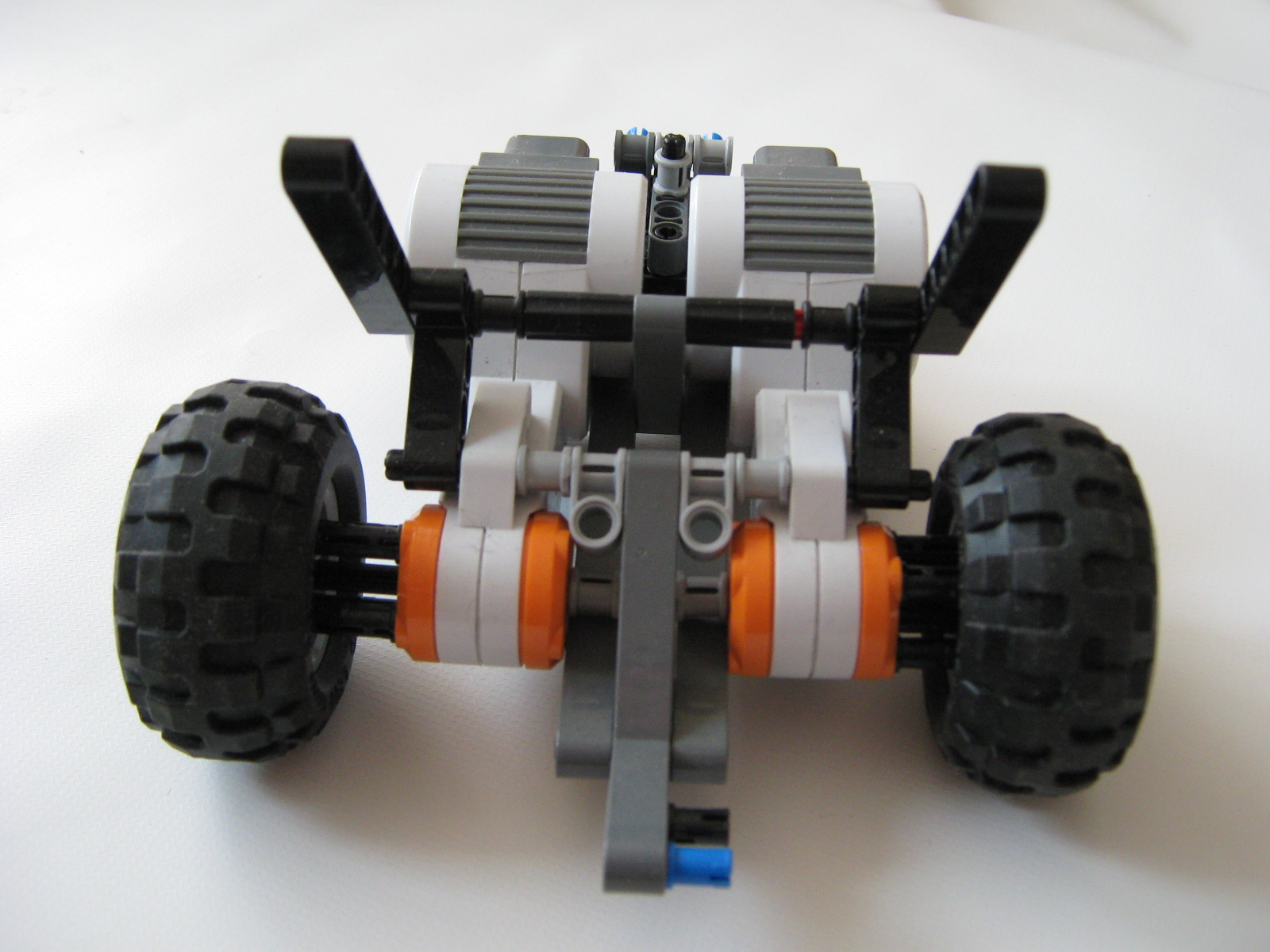
- U tohoto modelu se používají dva nezávislé hnací motory, každý pro jedno kolo.
- Vzadu je stabilizační kolo stejně jako u tříkolky.
- Tato konstrukce umožňuje řídit zatáčení robota pomocí změny výkonu jednoho z motorů.